�a(ch��n)���б� / products
�C�^늱��o�yԇ�x���ԇ����ʹ�÷������E
6.2.1�C�^늱��o�yԇ�x����ֱ��ԇ�&�n�a(ch��n)�s�p;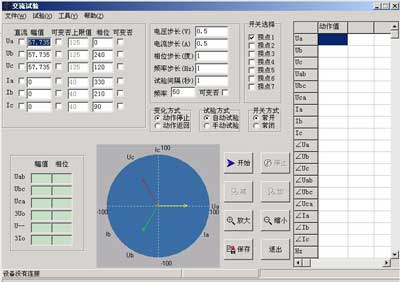
ԓ헜yԇģ�K�����ڽ���늉�������������^��������N���o�b���M���Ԅӻ��ք�ԇҲ�����ڸ��Nֱ��늉���ֱ������^������Ԅӻ��ք�ԇ
ԓ������һͨ����ԇ�?z��i)��K�������г�����ʹ�ù����z�u�i����ģ�K������늉�������ķ�ֵ����λ���l�ʾ��������O(sh��)�������ɰ����Բ��L���O(sh��)���ĕr�g�M������׃�����Ԍ����N�^��������o�b���M������ԇ�y������ֵ������ֵ�������r�g�ȡ�ԇ�������ψD��
늉���ֵ��57.73�V���������λ����120&�d�e�g;���l��50�H�z��ֱ����׃���(bi��o)־����ֱ��һ�ڃ�(n��i)����x&�l�d�q�u�o;&�r�a�d�i�c;&�r�d�q�u�o;����ʾԓ��ݔ��ֱ������׃��һ�����x&�l�d�q�u�o;&�r�a�d�i�c;&�r�d�q�u�o;��ʾԓ����(sh��)�����c׃�������xȡ�t��̶���׃��
�Ԅ�ԇ����ݔ���r�����c׃�����������O(sh��)�����L���g���r�g�Ԅ�׃����������ֵ�̶���׃���^��������tֹͣݔ���������Ԅӷ��ء�
�ք�ԇ�����B�m(x��)ݔ����(d��ng)ǰֵ����(d��ng)�c��&�l�d�q�u�o;����&�r�d�q�u�o;���o�r����׃����������һ�����L����(d��ng)�c��&�l�d�q�u�o;�pС&�r�d�q�u�o;���o�r����׃�������pСһ�����L������^�����������ӛ䛄���ֵ�̈́����r�g���@�r�yԇ�x���]��ֹͣݔ���������߿ɷ�����׃������(sh��)��ֱ���^������أ�ӛ䛷���ֵ�ͷ��ؕr�g�������ք�ԇ���Á�������ֵ��
ԇ��g���r�g���Ԅ�ԇ�rÿ׃��һ�����L���g���r�g�����_����(sh��)�����慢��(sh��)���֏�(f��)��(sh��)��(j��)���������O(sh��)�õĔ�(sh��)��(j��)��������&�l�d�q�u�o;���慢��(sh��)&�r�d�q�u�o;������Ӳ�P�ļ��У��Ժ������&�l�d�q�u�o;���_����(sh��)&�r�d�q�u�o;�{(di��o)���������ϵĔ�(sh��)��(j��)��ԇ�r���p��׃������&�l�d�q�u�o;�֏�(f��)����(sh��)&�r�d�q�u�o;����(sh��)��(j��)�֏�(f��)���ʼֵ��
ԇ�r��Ӌ��C�Ԅ�Ӌ�㲢�@ʾ��늉���ؓ��늉�������늉��Ȕ�(sh��)��(j��)�����@ʾ���������늉���ʸ���D��ʸ���D����&�l�d�q�u�o;�Ŵ��R&�r�d�q�u�o;�M�зŴ�ͿsС��
ע�⣺1������늉�ÿ���z�u�i���75�V����(d��ng)��Ҫ�^��ݔ��늉��r���Ɍ���ͨ����(li��n)ʹ�á���V�A(ch��)ݔ��75�V����λ0&�d�e�g;���V�Bݔ��75�V����λ180&�d�e�g;���t�V�A(ch��)�Bݔ����150�V��
2��ֱ��늉�ÿ��zui���±110V��������늉�����110V�r���Ɍ����മ(li��n)ʹ�á��猢VA�O(sh��)��110V��VB�O(sh��)�飭110V���tVAB��ݔ��220V��
3���������������30A����(d��ng)�����������30A�r���ɲ��Ã�������������(li��n)ݔ�����������������O(sh��)��ͬ��λ��Ո�M�����^�֣��^�̵ľ����ԜpС��·��衣
3�p�����z�u�i����һ������Ϣ��ʾ�ڣ���(d��ng)�@ʾ�O(sh��)���B���������f���������ݔ������(d��ng)�@ʾ�O(sh��)��]���B�ӣ��f����X�c���C�]�B�ϣ�������M��(li��n)�C�����o�����r�gҲ���@ʾ�ڴ˙ڡ�
6.2.2&�n�a(ch��n)�s�p;�C�^늱��o�yԇ�x���Mԇ�&�n�a(ch��n)�s�p;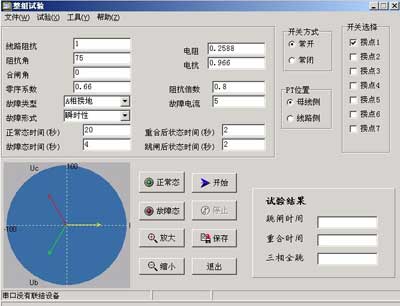
ԓܛ������ģ�Mݔ늾�·���N������r������ԇ�o�b�õ����l���غϼ�����ٵȹ��ܡ��m�÷��������ԣ������S�^���ķ���
������Ϳ��x�A(ch��)�N���B�N���C�N���A(ch��)�B���B�C���C�A(ch��)���A(ch��)�B�N���B�C�N���C�A(ch��)�N���A(ch��)�B�C�������迹���ԸZ/&�p���i;��ʽݔ���R���X��ʽݔ�롣��һ�N��ʽݔ�룬��һ�N��ʽ��ֵӋ��C�Ԅ������
��·�迹=�迹ϵ��(sh��)&�t�i�m�e�s;�����迹���Դ�ֵ�����·�c�迹�M�й���ģ�M��
�����a��ϵ��(sh��)�K0=���Z0/�Z1-1��/3��һ��K0ȡ�K�X��
�yԇԭ�������r�g���ƺͽ��c���Ƽ��ݷ�ʽ�����c��(y��u)�ȵ�ԭ�t��������c�����t�D(zhu��n)����һ��B(t��i)��������c���ӄt���r�D(zhu��n)����һ��B(t��i)���Еr�F(xi��n)���]�����l��(ji��)�c���غϹ�(ji��)�c���@�r���Ԍ����ϕr�g�O(sh��)���Դ��ڱ��o�����r�g�����l���B(t��i)�r�g���O(sh��)���Դ����غ��l�Ą����r�g����
���o�Ą����r�g���غ��l�����r�g���ɱ��o����ֱ���x����
���l�ǣ����ϰl(f��)���r�̵A(ch��)��늉��ij���ǡ�
�P�T���bλ�ã�ģ�Mһ��(c��)늉��������ǰ��b��ĸ����(c��)߀�Ǿ�·��(c��)���P�T���b��ĸ����(c��)�r���������_��ԓ��������㣬늉��֏�(f��)��������늉�57.73���P�T���b�ھ�·��(c��)�r�����������_��ԓ�������늉������㡣
���Ϸ�ʽ�����N��˲�r�ԡ�*�ԡ��D(zhu��n)�Q�ԡ�
�D(zhu��n)�Q�Թ��Ͽɷ֞�ǰ�D(zhu��n)�Q�ͺ��D(zhu��n)�Q��ǰ�D(zhu��n)�Q��ָ�������_���غ�ǰ�l(f��)���D(zhu��n)�Q�Թ��ϡ��˕r���o��(y��ng)�����������غϡ����D(zhu��n)�Q��ָ�������_���غ��l�������غϺ�l(f��)���D(zhu��n)�Q�Թ��ϡ��@�r�ஔ(d��ng)��*�Թ��ϡ�ֻ�ǹ������e��һ�ӡ��@�r���o��(y��ng)ԓ�Ǽ���������
���N��B(t��i)ݔ����������B(t��i)&�r�a�r�r;���ϑB(t��i)&�r�a�r�r;���l���B(t��i)&�r�a�r�r;�غ�&�r�a�r�r;����������������
�Ӿ���ʽ�Ͳ�������ͬÓ�Cܛ����&�l�d�q�u�o;���Mԇ�&�r�d�q�u�o;��
����ڽ��c�]�У�Ҳ�ɽ�һ�ˎ��λ�Ŀս��c����D��ʾ��
6.2.3�A���迹
&�n�a(ch��n)�s�p;���ھ�·���o��ֵУ�Ñ�ݔ��Z1���Z2���Z3�������迹��ֵ���迹ϵ��(sh��)0.7��0.95��1.05���Ñ����ġ�Ҏ(gu��)��Ҏ(gu��)��0.95���ɿ�������1.05����һ�΄�����ͨ�^�y�������r�g�����Д�����һ�΄����������B(t��i)�r�g���ڱ��o���M��(f��)�w�r�g��һ��ȡ20�룬���ϑB(t��i)�r�g��(y��ng)�����迹��΄����r�g���m�÷��������ԣ������S�^���ķ���
�V�A(ch��)���V�B���V�C���V�N���I�A(ch��)���I�B���I�C���I�N���뱣�o������(y��ng)���ӣ����oֻͶ���x���壬���x���ڿս��c������yԇ�x���_�P(gu��n)��ݔ��ͨ���е���һ·������ڽ��c�]�У�Ҳ�ɽ�һ�ˎ��λ�Ŀս��c����D��ʾ��
6.2.4 ���l׃�������x���o
������քeģ�MU�ࡢV�ࡢW������ӵ�˲�r���Ϻ�uv��vw��wu���g˲�r���ϣ�ģ�M��������̶���ģ�M����ǰ늉����~��늉�57.73V��ģ�M���ϕr�gһ���100-150ms������ӵع��ϕr����·늉�V=��1+K��I×ZD+��1��1.05m��×Un�����g��·�r����늉�U=2×I×ZD+��1��1.05m��× Un��ʽ��m��ϵ��(sh��)����ֵ�քe��0.9��1.2�������C���o����(d��ng)m=0.9�r��D++���ڣ�����Ԫ�����ڣ�����(d��ng)m=1.2�r��DZ��D++����(y��ng)���ڣ�DZ��ͻ׃�����x���ڣ�DZ�Ȅ�������Ͷ�������o�������o�����ౣ�o��(y��ng)�˳���
�Z�D&�m�d�a�s��;&�m�d�a�s��;���l׃�������x���o��ֵ��
���l׃�������x���o�ډm=1.2���r����(y��ng)�ɿ��������ډm=0.9�r����(y��ng)�ɿ����������m�÷��������ԣ������S�^���ķ�������ڽ��c�]�У�Ҳ�ɽ�һ�ˎ��λ�Ŀս��c����D��ʾ��
6.2.5���ԇ�
&�n�a(ch��n)�s�p;������������׃��ӱ��oԇ�m�÷��������ԣ������S�^���ķ���
�����x�I1=�I�a���I2=�I�a(ch��n)���I1��1��(c��)���������߉���(c��)�����I2��2��(c��)���������͉���(c��)�����I1���I2���l�ʿɶ��x����������Ρ������C���ȡ���ֵ���Kֵ�����L����λ�Ñ��������O(sh��)�������ڜyԇ�x���Mȥ�����ֻ�Ǽӵ��ߵ͉���(c��)�������������Ą���������Ƅ���������ԣ���������I�d���Ƅ�����I�z�谴һ���Ĺ�ʽ�M����������γɣ��������ṩ��һЩ��ʽ���Ñ�����(j��)���o�S���ṩ�Ĺ�ʽ�M���x�����ڞI�����I2����׃�������γ�һ�����S��(sh��)�M��������ֱ������(bi��o)������Ƅ�������
��ԇ��회����o���ڽ��c����yԇ�x���_��ͨ�����y���c��(sh��)������ʼ����ͽKֹ�����Q������ijЩ׃������ӱ��o����Ӌ�㹫ʽ��һ�ӣ�������һ�����w�����h����“����ԇ�”�������քӷ������M��ԇ�����������ֱ�^һЩ��ʹ�÷����Ʌ���Ó�Cܛ����“���ԇ�”����
6.2.6�迹��λ����
&�n�a(ch��n)�s�p;�C�^늱��o�yԇ�x�����������迹�^�������λ���Ԝyԇ��
0-360&�d�e�g;ȫ��������ͨ�^�Ƅ����(bi��o)�x��������ģ�����돽���͒��貽�L�����ԚWķ��ʾ�����跶��һ���*�������B(t��i)�r�g��(y��ng)���ڱ��o��(f��)�w�r�g�����ϑB(t��i)�r�g��(y��ng)���ڱ��o�����r�g���ǶȲ��Lһ����O(sh��)10��15�ȣ��x���_ʼԇ�������������@һ�c��������o���������f���������IJ��ڄ����^(q��)������Ո�����x��������ģ�����������Ą������t�����貽�L�M�В��裬ֱ���������^(q��)��ֹ��������һ���ǶȲ��L�������裬ֱ���������^(q��)��ֹ���@�Ӿ��ڒ������ĸ����γ���һ�����@�Ą����^(q��)���@�������^(q��)���Π�������ģ������LjA�Ρ���߅�λ��߅�εȣ��@�ӾͿ���ԇ�A�迹�Ͷ�߅���迹����λ���ԡ�
�C�^늱��o�yԇ�x�Ӿ���ʽ�����yԇ�x��늉�����������^�����늉��������Ȧ�������_���c������yԇ�x���_����ͨ����


��Ϣ") �c������
�c������